Grippers hainbat motatan bana daitezke, elektrikoak eta pneumatikoak barne.Beraz, zer desberdintasun dago gripper elektrikoen eta pneumatikoen artean?
1: Zer da pinza industrial bat?
Gripper industrialak gripper mekanismo mekaniko gisa ere ezagutzen dira.Robot harrapatzeko mekanismoa benetako lan-baldintzen arabera diseinatuta dago eta hainbat forma ditu.
Harrapaketa mekanikoak, oro har, bi hatzetako harrapaketa dira, mugimendua, atzematea eta mekanismoaren ezaugarriak dituztenak.Jarraian, hitz egin dezagun alderdi garrantzitsu batzuei buruz.Bata, amaierako estutze-mekanismo pneumatikoa da, ekintza-abiadura oso azkarra duena, jariakortasuna sistema hidraulikotik dator, presio-galera nahiko txikia eta distantzia luzeko kontrolerako egokia da.Bigarrena, xurgatze-muturreko atxikitze-mekanismoa da, eta xurgapenaren xurgapen-indarra erabiltzen du objektua mugitzeko.Batez ere, itxura-erlazioa eta lodiera neurrizko igoera duten objektuetarako egokia da, hala nola beira, papera, etab. Bata amaierako clamp-mekanismo hidrauliko bat da, objektuak clamping hidrauliko eta malgukiaren askapenaren bidez.Baina, azken finean, robot industrialen atzaparrek gure lana hobeto egiten lagun diezagukete.
2. Gripper elektrikoaren eta gripper pneumatikoen arteko aldea
Pintza pneumatikoekin alderatuta, pinza elektrikoen aplikazioak industria-automatizazioaren arloan ezaugarri hauek ditu:
1), motor elektriko motak autoblokeatze-mekanismoa du, eta horrek piezaren ekipamenduak elektrizitatearen hutsegitearen ondorioz kaltetzea eragotzi dezake.Gripper pneumatikoekin alderatuta, seguruagoa da;
2), Gripper elektrikoak kontrol funtzio programagarri bat du puntu anitzeko kokatzea lortzeko.Grip pneumatikoek bi geraleku baino ez dituzte, eta elektrikoek, berriz, 256 geldialdi baino gehiago izan ditzakete.Hatz elektrikoaren azelerazioa eta dezelerazioa kontrola daitezke piezaren gaineko eragina minimizatzeko.
3), gripper elektrikoa gripper malgua da, indarraren kontrol zehatza lor dezakeena, gripper pneumatikoa oszilazio prozesu bat den bitartean.Printzipioz, oszilazioa dago, ezabatzea zaila dena.Gripper elektrikoaren estutze indarra erregulatu daiteke begizta itxiko indarra kontrolatzeko.Pintze-indarraren zehaztasuna 0,01N izatera irits daiteke eta neurketaren zehaztasuna 0,005 mm-ra irits daiteke.Gripper pneumatikoen indarra eta abiadura kontrolaezinak dira funtsean, beraz, ezin dira erabili malgutasun handiko lan finetarako.
4), gripper elektrikoaren bolumena gripper pneumatikoena baino askoz txikiagoa da.Instalatzeko ere oso erosoa da.Mantentzea erraza da.
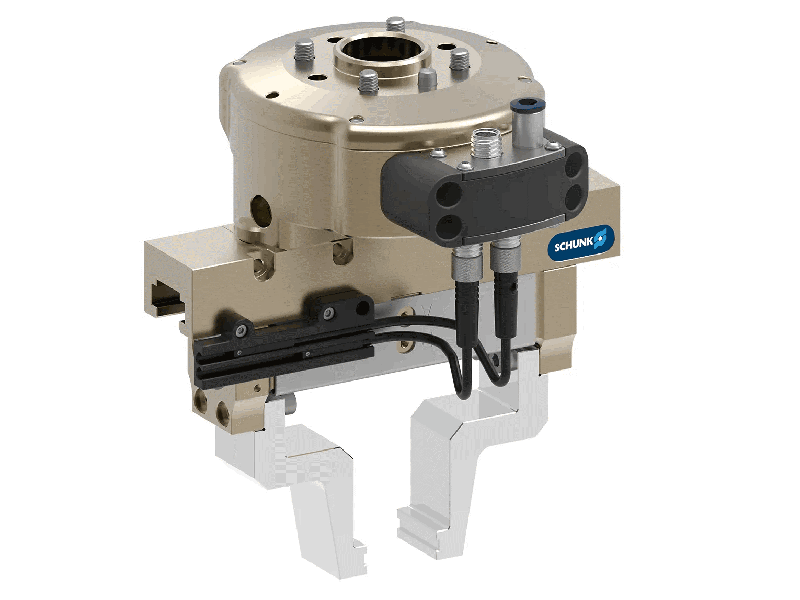
pinza pneumatikoa
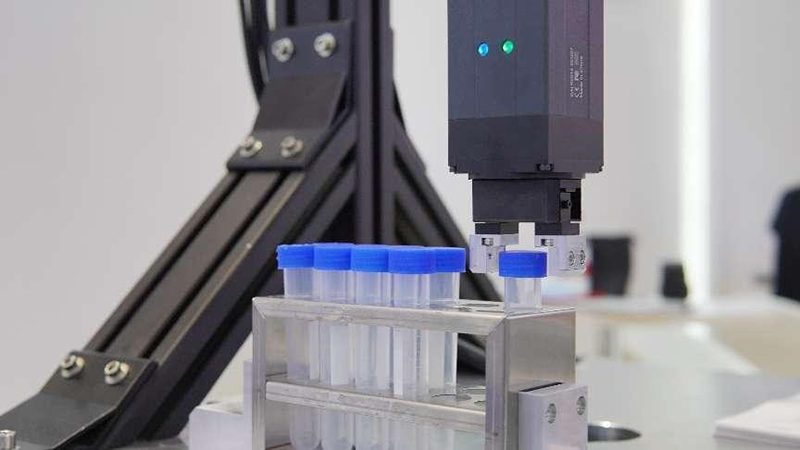 Gripper elektrikoa
Gripper elektrikoa
3. Pintza elektrikoaren abantailak
1. Barailen posizioa kontrolatu
Masailezurren posizioa kodetutako motor bat eta kontrol-eskema egokia erabiliz zehaztu daiteke.Aitzitik, masailezur tradizionalekin, normalean beharrezkoa da trazu osoa edukitzea.Pintza elektrikoak erabiltzen dituzunean, erabili piezaren ondoan behar den tartea soilik eta, ondoren, gutxitu bidaia.Piezen etengailuek pieza-tamaina zabalago baten aukeraketa errazten dute produkzio-zikloen denborak kaltetu gabe.
2. Kontrolatu gripa eta abiadura
Motor-korrontea aplikatutako momentuarekin zuzenean proportzionala denez, posible da aplikatutako grip-indarra kontrolatzea.Gauza bera gertatzen da ixteko abiadurarekin.Adibidez, honek pieza hauskorretan lagun dezake.
Argitalpenaren ordua: 2022-12-19